Development of Multi-agent RL for Achieving Cooperative Mission over UAVs
Summary
Our research project aims to develop advanced multi-agent reinforcement learning (RL) and imitation learning algorithms specifically designed for unmanned vehicles. This innovative approach seeks to enhance the autonomy, efficiency, and reliability of UAV task assignment in various environments and scenarios.
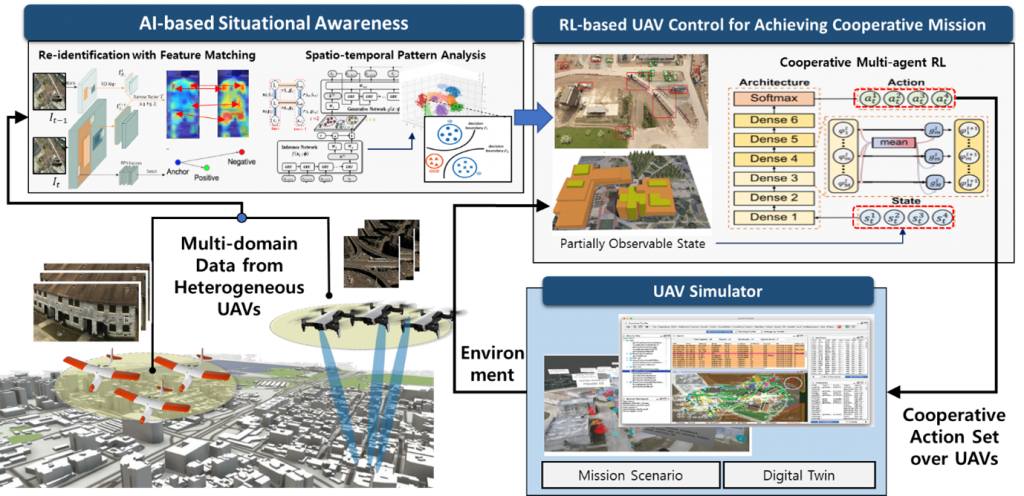
- AI-based Situational Awareness: From multi-domain data of heterogeneous UAVs, we are going to develop AI algorithms for target re-identification and spatio-temporal pattern analysis. This will enable RL algorithm to improve intelligent decisions and identify opportunities for collaboration with other UAVs while minimizing risks and maximizing mission success.
- RL-based UAV Control for Achieving Cooperative Mission: The centerpiece of our research is the application of reinforcement learning (RL) to UAV control for the execution of cooperative missions. UAVs learn optimal strategies for collaboration, such as formation flying, area surveillance, and target tracking, through trial and error in a simulated environment.
- Development of RL Agent System Interacting with UAV Simulator: A key innovation of our project is the development of a robust RL agent system that interacts directly with a UAV simulator. It serves as a testbed for our RL algorithms, allowing us to simulate complex mission scenarios and evaluate the performance in an urban environment.